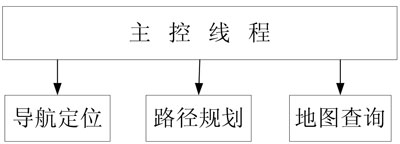
This design uses ARM processor and embedded operating system μC / OS-II as the development platform in the system terminal. By using the ARM processor, the maximum CPU operating frequency of 60MHz can be achieved, which greatly enhances the data processing capability. The software developed and designed by the operating system μC / OS-II has a strong scalability and stability. system structure Figure 1 hardware block diagram Figure 2 Serial communication circuit Figure 3 USB interface circuit Figure 4 display module software design Figure 5 Software system block diagram 2 Software system design The navigation software is based on the navigation database. With regard to the operation behavior of the navigation database, the navigation software is functionally divided into a part with navigation function and a part with browsing function. 3 Software interface design As mentioned above, the navigation software is divided into a part with a browsing function and a part with a navigation function in terms of large functions. Therefore, two different interfaces have been designed: a browsing interface and a navigation interface. Figure 6 Thread diagram The embedded system uses the μC / OSII operating system. Due to the limited processing function of the MCU, the multi-thread technology is used in the specific software implementation process, as shown in Figure 6. Disposable Vape,Disposable Vape Flavours,Disposable Vape Fume,Disposable Vape Flum Lensen Electronics Co., Ltd , https://www.lensenvape.com
1 Function introduction The vehicle-mounted GPS navigation system obtains the latitude and longitude of the current location from the GPS system, obtains the actual location on the map through conversion and map matching, and then the user inputs the destination, calculates the shortest path through the A * shortest path algorithm It is displayed on the vector map, and the speed, time and other information provided by GPS is extracted and displayed on the screen.
2 System hardware structure The hardware core of the system is ST / 16-bit RISC processor STR710FZ2T6 chip in ARM7 series of STMicroelectronics. The chip has rich peripherals and enhanced I / O functions, which can meet low power consumption and high performance. The embedded system application also has an external memory interface (EMI) that can address 4 memory segments, supports multiple memory types such as SRAM, Flash and ROM, and supports multiple boot modes. It is very suitable for the development of embedded systems, this system is designed based on these characteristics of the chip. The system block diagram is shown in Figure 1. 
The system takes the STR710FZ2T6 microprocessor as the core, using two 512KB SDRAM (IS61LV25616), one 8MB NAND Flash and one 2MB NOR Flash (SST39LF160). A GPS module for receiving GPS signals, a liquid crystal panel for display, and a keyboard input module are added externally.
â‘ RS-232 serial communication interface circuit In the design of this paper, the system uses the RS-232 serial interface for data transmission with the outside world, and its circuit is shown in Figure 2. STR710FZ2T6 has a full-duplex serial communication interface, through which it realizes data communication with GPS module, and uses MAX3232 chip to realize the conversion between RS-232 level and TTL level. 
SP3232E is an RS232 interface chip produced by Sipex Company. It uses a single power supply voltage. The power supply voltage can work normally in the range of 3.0 to 5.5V, and its rated current is 300μA. Only need to connect four 0.1μF capacitors to ensure that the data transmission rate maintains the RS232 output level at 120Kb / s, which can easily complete the conversion between TTL level and RS232 level.
â‘¡USB interface circuit In order to develop the USB function in the future, set up the USB port first. The interface circuit is shown in Figure 3. 
3 The choice of hardware platform for embedded development of ARM control modules is mainly the choice of embedded processors. What kind of embedded processor core to use in a system depends on the application field, user needs, cost, and difficulty in development Factors such as ease of use. After determining which embedded processor core to use, the next step is to select a suitable processor based on the actual situation, considering the needs of the system peripherals. In this design, the data processing and control module is the core control component of the vehicle. It is an embedded system based on the ARM microprocessor. Its main function is to perform data processing and control the components of the vehicle, and according to the communication protocol. According to the requirements. The system includes CPU memory, I / O interface, and various control logic circuits. Combined with the actual situation of current civilian vehicles, the STR710FZ2T6 microprocessor is selected. It uses a high-performance 32-bit structure, has a high-density 16-bit instruction set and low power consumption. The peripheral functions are combined on a microprocessor, which provides a flexible and low-cost solution for a large number of computer embedded control applications.
4 The GPS module used by the GPS module system communicates with the microprocessor control module through asynchronous serial communication. Only two signal lines TXD, RXD and ground can be connected to the hardware connection for data transmission.
Serial communication uses a higher communication voltage of ± 5 ~ ± 15V, often uses ± 10V and ± 12V, and is a negative logic level, that is, logic 0 level is specified as +5 ~ + 15V, logic 1 level is specified as- 15 ~ -5V, so the standard serial interface and TTL / CMOS level must undergo level conversion.
In the design, the serial communication interface uses MAX232 of American letter company as the conversion chip. MAX232 can convert two sets of serial signals. In this design, only one set is converted. TXD2 is connected to RXD2 and peripheral GPS, and MCU_RXD is connected to MCU_TXD and ARM processor. The four lμF charging capacitors connected to the MAX232 chip can work when the chip is connected to a 5V voltage. 
5 Display module TG160128 liquid crystal display module is used in this design, with direct access. Connect the liquid crystal display module with built-in 6963 controller directly to the P0 and P2 ports of STR710FZ2T6. The reading and writing of the display module are controlled by the read and write operation signals of ARM. Then output the received and processed navigation information to Frame Buffer. At this time, the precise longitude, latitude and local time of the positioning point can be displayed on the display screen. The specific circuit is shown in Figure 4.
1 Software data design The data in the navigation software is mainly the spatial data of the navigation map, which is mainly composed of some information related to the navigation needs, including the road network geometry, road grade and service facilities. 
4 Embedded software design