Perfect reproduction of instrument sound with MEMS accelerometer as pickup
MEMS (Micro Electro Mechanical Systems) sensors are common in a variety of applications such as automobiles, cell phones, personal computers, and cameras, but until now, such sensors have not been used in the guitar field. The authors will explore the answers to the following questions: How to use MEMS accelerometers as acoustic sensors.
MEMS accelerometer technology
This article refers to the address: http://
The core unit of a typical MEMS accelerometer is a movable strip structure consisting of two sets of finger bars: one set is fixed to the substrate and the other set is mounted on a mass on a set of springs. The spring is capable of moving according to the applied force, changing the capacitance between the fixed grid and the moving grid (see Figure 1).
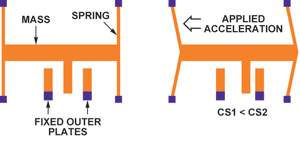
Figure 1 Structure of MEMS accelerometer
The MEMS structure (see Figure 2) is typically made of monocrystalline silicon or polycrystalline silicon deposited onto the surface of a single crystal silicon wafer at very high temperatures. With this flexible technology, structures with widely differing mechanical properties can be made. The spring stiffness, the quality of the sensing element, and the structural damping can all be controlled and changed by design to achieve a sensor that can sense bandwidths up to 20 kHz from a few g to a few hundred g.
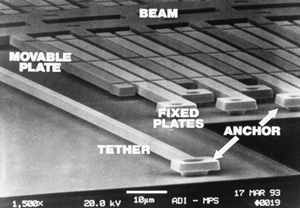
Figure 2 Micrograph of the ADXL50 MEMS accelerometer structure
The MEMS sensing unit can be connected to the same chip (see Figure 3) or to a signal conditioning circuit on a different chip (see Figure 4). For a single-chip solution, the capacitance of the sensing unit can be as low as 1 to 2 fF, which is equivalent to the measurement resolution of the aF range. In a two-chip architecture, the capacitance of the MEMS cell must be high enough to overcome the parasitic capacitance effects of the connection lines between the MEMS and ASIC conditioning circuitry.
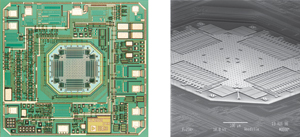
Figure 3 ADXL202 ± 2g accelerometer
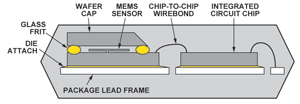
Figure 4 Cross-sectional view of a typical two-chip accelerometer
Accelerometer as a vibration measuring sensor
Using a vibration sensing sensor as a pickup in an instrument is not a new concept. Piezoelectric and electromagnetic sensors are the basis of many current pickup applications. Micro MEMS accelerometers are small in size and thin in shape, so they do not create mechanical or mass loading effects in the instrument, making them attractive for these applications; however, due to the extremely low bandwidth of commercial accelerometers, such accelerometers Applications have been limited so far.
Some of the latest breakthroughs in accelerometer technology have enabled mass production with very high bandwidth but very small accelerometers. ADI's ADXL001 (see Figure 5) in a 5mm x 5mm x 2mm package size has a high g (±70 to ±500g) uniaxial accelerometer with a bandwidth of 22kHz. This product can determine the "health" of a motor or other industrial device by detecting changes in the acoustic properties of the device. However, this special sensor is not sensitive enough to be used as an acoustic vibration sensor for musical instruments. An ideal acoustic sensor needs to measure all three axial responses, while it can only sense single-axis motion. However, it has now been demonstrated that MEMS technology has been able to achieve acceleration sensors within the full audio bandwidth.
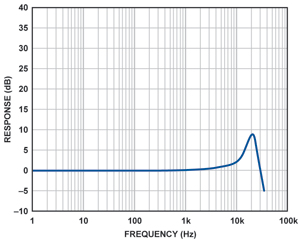
Figure 5 Frequency response curve of ADXL001
Low-g accelerometers can measure accelerations as low as one-thousandth of a gth, but bandwidth is typically limited to around 5 kHz. The reason for this limitation may be that there are too few commercial applications that require very high bandwidth (the main applications include human motion or gravity-induced acceleration detection), so the industry lacks sufficient power to develop sensors that are particularly suitable for audio frequency band measurements.
The three-axis accelerometer has three independent outputs that measure the acceleration in the X, Y, and Z directions along the Cartesian coordinate system. For example, ADI's ADXL330 three-axis low-g accelerometer has a bandwidth of up to 6 kHz on the X-axis and Y-axis, and a bandwidth of about 1 kHz on the Z-axis. Although not ideal enough, this bandwidth has enabled the device to capture useful information on the audio band. Its output is an analog signal, so it is easy to use in standard recording equipment. Since its size is less than 4mm x 4mm x 1.45mm (see Figure 6), the sensor can be placed in a very small space without any mass load or other changes in response to the system being tested. Here's how the low g accelerometer can be used as a guitar pickup.
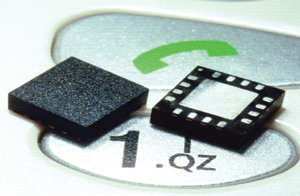
Figure 6 ADXL330 MEMS accelerometer
Acoustic feedback
Danish scientist Soren Larsen first introduced the omnidirectional capacitive dynamic microphone in the mid-1920s, and he first discovered the principle of acoustic feedback (called the Larsen effect). For acoustic engineers, acoustic feedback has always been a nightmare, and few engineers have complete control over it, especially at any performance site. The Beatles fully felt the impact of this pseudo-sound, and in 1964 decided to add it to the prelude to their classic album "I Feel Fine." Then the rock music community began to use it like a tame beast, using sound feedback to add a refreshing feature to rock music. Electric guitarists, such as Pete Townshend and Jimi Hendrix, deliberately put the guitar close to the speakers to take advantage of acoustic feedback. As this trend subsided, acoustic engineers continued to work to eliminate the unpleasant audible effects of acoustic feedback, especially during live performances. In a fully equipped and specially acoustically tuned studio, the omnidirectional microphone is the perfect way to record the sound of the instrument, with an amazing sense of presence and fidelity. Artists who understand and cherish this have been tirelessly seeking ways to reinvent this effect on the stage. While it is always a musician's dream to hope to be able to record live performances in the same quality as a studio, it is almost impossible. Even with the best sound equipment on the stage, the stage has been designed with great acoustics, and sound engineers can master all kinds of reverberations and have the best equipment and tools, but the ideal sound still exists. An insurmountable obstacle: that is, acoustic feedback.
pickup
Acoustic feedback can usually be minimized by using directional microphones. To some extent this method is effective, but the tuning engineer needs to constantly adjust to adapt to the changing characteristics of the stage.
The instrument sound can be amplified using a pickup. The various techniques used are somewhat different, but the basic principle is to directly sense the vibration of the instrument itself, rather than sensing the sound waves in the air. The advantage of this approach is obvious, that is, the pickups produce almost no acoustic feedback because they are insensitive to sound waves transmitted in the air. However, this method also has many shortcomings: it is extremely difficult to find the best sounding position on the instrument. The acoustic characteristics of the piezoelectric pickups are far from perfect. Their output impedance is high resistance, so special needs are needed. Instrument input or direct box. In addition, the volume is large, which affects the natural acoustic characteristics of the instrument itself.
Thus, this gave birth to the concept of a lightweight contact microphone. If we use a surface sensor to measure the acceleration of the instrument body, it is better to have a single axis or more. This sensor has better linearity and light weight so as not to affect the sound characteristics of the instrument being tested. It is further assumed that these sensors have similar output levels, output impedance, and power requirements comparable to conventional microphones. In short, imagine that the musician simply plugs the sensor into the mic preamp or mixer input, just like any other microphone.
Contact microphone
Attentive readers will surely notice that we have already mentioned the concept of acceleration. The human ear responds to sound pressure, so the microphone is also designed to be a sound pressure sensing function. To simplify the discussion, a straightforward conclusion is given here that a sound pressure close to the vibrating body is proportional to the acceleration. The question is how high the bandwidth of the accelerometer can be used as a contact microphone?
To study this concept, we mounted a three-axis accelerometer on the guitar as a pickup. The vibration of the instrument is measured and compared to a built-in piezoelectric pickup and a MEMS microphone close to the guitar. The guitar used is Fender Stratacoustic with built-in Fender pickup. An analog output MEMS accelerometer is mounted on a very lightweight flexible circuit and placed in the bridge position of the guitar with beeswax, as shown in Figure 7. The X-axis of the accelerometer is in the same direction as the guitar string, the Y-axis is perpendicular to the guitar string, and the Z-axis is perpendicular to the guitar surface. A MEMS microphone with a flat frequency response of 15 kHz was placed as a reference 3 inches away from the string.
A sound was recorded using the accelerometer, the built-in piezoelectric pickup, and the MEMS microphone. Figure 8 shows the time domain waveform for each sensor, and there is no post processing for any of the segments.

Figure 7 Accelerometer Mounted on a Fender Stratacoustic Guitar
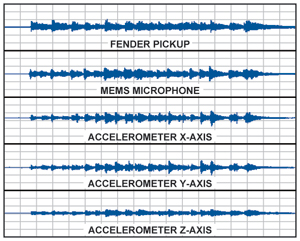
Figure 8 Time domain waveform with different sensors
Figure 9 shows the FFT spectrum of a piezoelectric pickup measured on a peak of the above time domain waveform. The result shows a strong bass component in the response. Indeed, the actual audio file has a rich bass response. This sound is more pleasing (depending on personal preference) because the cavity resonance produces a richer bass than it is heard directly from the instrument.
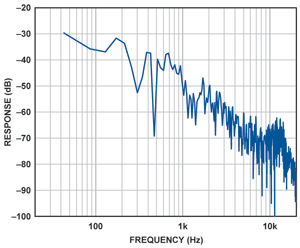
Figure 9 FFT spectrum of a piezoelectric pickup
The output of the MEMS microphone is very flat, and the reproduction of the music is very good. Its sound quality is very natural, the balance is good, and the fidelity is high. The FFT spectrum measured at the same time point as the piezoelectric pickup is as shown in Fig. 10A. For reference, Figure 10B shows the frequency response of a MEMS microphone.
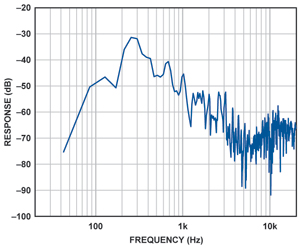
Figure 10A FFT spectrum of a MEMS microphone
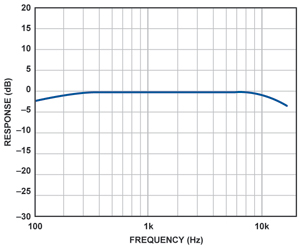
Figure 10B Frequency response of a MEMS microphone
The output of the MEMS accelerometer is very interesting. Current shortcomings include a high background noise, can be heard at the beginning and end of the track, and the Z-axis bandwidth is significantly limited to lower frequencies. The sound reproduction in each axial direction is also significantly different.
The sounds on the X and Y axes are crisp and clear, and there are significant differences in tone. As expected, the sound on the Z-axis is clearly dominated by the bass. Figure 11 shows the spectrum (C) on the X-axis (A), the Y-axis (B), and the Z-axis.
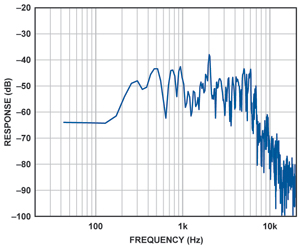
Figure 11a MEMS accelerometer X-axis output
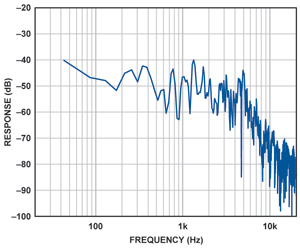
Figure 11b MEMS accelerometer Y-axis output
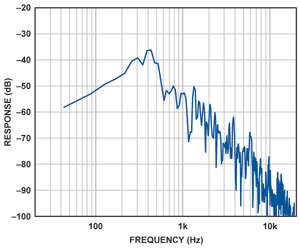
Figure 11c MEMS accelerometer Z-axis output
If the X, Y and Z axes are mixed together, a better reproduction of the music can be achieved with a certain degree of clarity. By adjusting the mixing section, the pitch balance can be changed to achieve natural music reproduction. Due to the bandwidth limitations of current accelerometers, a wider range of high frequency harmonics is lost, but the sound reproduction is still surprisingly realistic.
Conclusion
MEMS accelerometer technology has significant potential for instrument pickup applications, especially for field applications that are plagued by acoustic feedback problems. A very small, low-power MEMS device can be placed in any inconspicuous position on the instrument without affecting the natural vibration characteristics of the instrument.
Explosion Proof Motor,Explosion Proof Servo Motor,Exproof Motors,Explosion Proof Ac Motor
Yizheng Beide Material Co., Ltd. , https://www.beidevendor.com