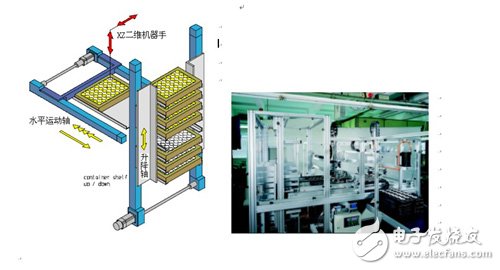
In the automated assembly and testing of lipsticks, in the automated measurement of mobile phone batteries, in the automated packaging and labeling of medicines, etc., feeding and unloading of CNC machine tools, in the powder die casting industry, in the classification, assembly and testing of various instruments, etc. Handling of a large number of small parts. One of the characteristics in this type of application is that the parts are small, the quantity is large, and the surface requirements are high. For this reason, a small tray is designed to be specially equipped with specific parts. The quantity is large at one time, and the parts are strictly separated for easy transportation. The structure of this type of robot varies greatly depending on the specific application, but the principle is almost the same. All this article uses the RMS 600 of the German Berger Lahr company as an example to introduce this type of feeding mechanism. Figure 1 shows the original picture of a standard batch supply mechanism, which consists of the lifting part of the tray stack, the horizontal movement part of the tray and a two-dimensional XZ robot. In the example shown in Figure 1, there are a total of eight trays in the lifting part of the tray stack, which are driven by the linear motion unit to move up and down arbitrarily and accurately. When working, raise the first tray at the top to a certain height higher than the horizontal movement axis and stop, and then move the first tray in the horizontal axis so that the carriage is under the first tray. Then the lifting shaft is lowered so that the first pallet is on the pallet of the horizontal shaft. Then the lifting shaft is raised by 10mm, and then the horizontal axis moves back to bring the tray to the front of the two-dimensional XZ robot. The XZ two-dimensional robot handles the first row of parts one by one, and then put it back in place after handling. When a row of parts is processed, the horizontal movement axis moves forward to make the second row of parts in a position that can be grasped by the robot. By analogy, after processing the last row of parts, the horizontal movement axis returns the tray to the original position of the lifting axis. Then process the parts of the next pallet, and so on, until all the parts on the last pallet are processed. Figure 1: Schematic diagram of the principle structure Figure 2: Large batch parts handling and feeding mechanism made for nanometer The feeding system shown in Figure 2 has a maximum of 8 pallets at a time. The size of each pallet is 600*400mm, and the maximum weight of the pallet and the parts inside is less than 15 kg. Each pallet exchange takes 5 seconds, and the positioning accuracy of each moving part is 0.1mm. The lifting shaft adopts a gantry structure composed of two PAS44BBs, with a maximum load of 400 kg. The horizontal movement axis adopts two PAS42BB, the maximum load can reach 80 kg. The X-axis of the XZ two-dimensional robot uses PAS42BB, and the Z-axis uses LM-A41BB. The movement speed is as high as 60 m/min. The claw is a suction cup, which grasps two parts at a time. The planetary reducer for each axis is the PLE series precision planetary reducer from Neugart, Germany. The whole system uses 4 PLE series precision planetary reducers and 4 programmable intelligent servo drive systems with motion control functions. Each motion axis and motion position are moved in place through sensors and intelligent drivers to output signals to ensure the motion distance of each motion axis. And exercise timing. Please contact Manager Cong of Shenyang Rhein Mechanical & Electrical Co., Ltd., 13897962353. 1) The number of pallets can be up to 18, 2) The size of the pallet can be customized as required, 3) The placement of the parts in the pallet is similar to the tooling, the parts are stable, and the parts can also be replaced by the tooling to complete the handling of other parts. 4) Pneumatic grippers, electric grippers, suction cups, etc. can be used to optimize the grasping and putting back of parts, 5) The entire system is small in size: length*width*height is 1500*1270*2150mm, 6) It has a certain degree of versatility, and other similar parts can be grasped by inputting different parameters. 7) Due to the small size of the pallet, the horizontal axis can also carry two pallets at a time. Through the introduction of the structure and working process of the feeding robot above, I believe that everyone has found that the feeding and unloading and handling robots composed of rectangular coordinate robots are very suitable for many applications, and are lower in cost and higher in efficiency than other robots. Europe is widely used in the production of cosmetics, food, mobile phones, sensors, toys, meters, etc. The above is only one type of loading and unloading robot. We also have more than 10 other types of loading and unloading robots. Baigla has produced thousands of similar robots in the past two decades. For details, please contact Shenyang Rhein Machinery Co., Ltd. Contact the company's Cong Dawei. Dc Relay,Dc Power Relay,Condenser Contactor,Voltage Protection Relay NanJing QUANNING electric Co.,Ltd , https://www.quanningtrading.com