This article refers to the address: http:// Optical Lens,Biconcave Spherical Lens,Meniscus Lens,Biconvex Spherical Lens Danyang Horse Optical Co., Ltd , https://www.dyhorseoptical.com
It supports adaptive noise cancellation, which reduces ambient noise in the microphone (incoming) signal, extracts the desired speech, and delivers clear voice (outgoing) to remote users.
Two factors determine the necessity of using a hands-free cellular telephone system. The first is that the terminals of the current cellular telephone system are mostly hand-held, which causes inconvenience to the driver. Drivers often have to put down their mobile phones and drive with both hands, such as turning, and then turn back to the conversation. The interruption of telephone conversations is inconvenient and can even result in economic cost losses because mobile telecommunications charges are quite high. Another important factor is security. Imagine a driver who uses only one hand to manipulate the steering wheel and the phone. Since the driver can't manipulate the steering wheel with both hands, it doesn't make sense to have any anti-lock braking system and airbags. Therefore, hands-free cellular telephone systems are becoming a must-have for drivers using mobile phones. 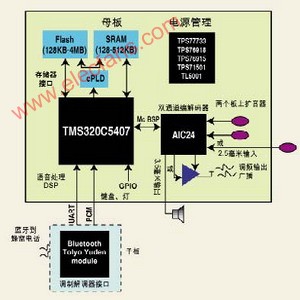
Figure 1: Hands-free kit development platform structure HFK development platform
The HFK development platform is a solution that includes DSPs, providing hardware and software design that enables rapid development of the final product and makes it unique. The HFK development platform can be connected to the TI Software Development Environment Code Composer StudioTM (CCStudio) development tool via JTAG. The development environment and documentation combine to enable rapid integration of TI DSP third-party software and accelerate time-to-market. The HFK development platform is suitable for high-quality automotive aftermarket hands-free kits that require high cost and performance, as well as Bluetooth-enabled HFK. Echo cancellation software for system-free
One drawback to the car hands-free broadcast/telephone system is that it feels echoed at the far end speaker. To create a comfortable full-duplex hands-free calling environment in the car, the most important software link is the echo canceller (AEC). The European Telecommunications Standards Institute (ETSI) is currently developing standards for AEC systems.
The echo phenomenon is caused by the coupling between the speaker and the microphone. In full-duplex communication, there is a delay in the far-end speaker hearing its own voice, and the length of the delay depends on the delay inside the car and the Global System for Mobile Communications (GSM). The echo path length is a key parameter of AEC. 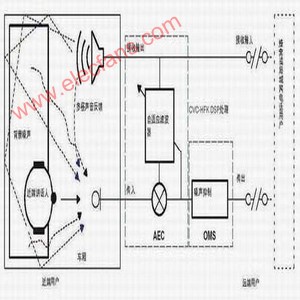
Figure 2: CVC-HFK application diagram
Adaptive filtering (more accurately, the NLMS algorithm) is one of the most common solutions for AEC. The NLMS algorithm achieves a good compromise between computation and performance.
Another issue related to AEC is the fuzzy sound (DT) situation in which two people speak at the same time. If not detected, DT will cause the divergence of the adaptive algorithm.
AEC software uses the NLMS algorithm to eliminate echo, which is performed by the C54x DSP assembler.
NLMS algorithm
The NLMS algorithm updates the coefficients of the adaptive finite impulse response (FIR) filter, which is used to predict the echo, and then we subtract the predicted value from the actual echo to give the residual echo.
2. Active channel detection
A key feature of the AEC algorithm is active channel detection. When the remote operator is silent and the near-end operator is speaking, since the near-end operator is no longer an echo, the filter is not adapted, by calculating the signal energy and comparing the energy with the adaptive threshold, Detection of active channels.
3. Fuzzy sound (DT) detection
In the case of DT, the near-end signal on the loudspeaker includes echo and near-end speech (ie, fuzzy tones). The residual error used to update the filter coefficients includes near-end speech, and if the algorithm is still adaptive, the algorithm may begin to diverge and this must be avoided. DT detection uses an energy-based algorithm and works with a variable threshold to solve this problem.
4. Benchmark
The benchmark for AEC software (in 16-bit words) is:
Code size: 154 words;
Static RAM: 527 words;
Erase RAM: 2 words;
The maximum calculation cost is 4.7 MIPS. The computational cost was the largest during the ST period and fell to 2.4 MIPS during the DT period. The ST period accounts for the main part of the call, while the DT period only occurs in shorter individual cases.
CVC-HFK software
CVC-HFK (Clear Voice Capture - Hands-free Kit) integrates echo cancellation, noise suppression, nonlinear processing and more, and is an optimized HFK solution. The CVC-HFK solution uses a comprehensive adaptive subband approach to improve the performance of key aspects while consuming only a small amount of resources. In the automotive environment, ambient noise is a major problem to be overcome by hands-free systems. Therefore, in addition to the echo cancellation function, Clarity CVC-HFK also provides an integrated single microphone solution (OMS) noise suppression algorithm. The OMS solution supports adaptive noise cancellation, which attenuates ambient noise in the microphone signal (incoming), extracts the desired speech, and transmits clean voice (outgoing) to the far end user. Since the CVC-HFK is fully adaptive, no more adjustments are required. Below, we will introduce the performance of the CVC-HFK solution and its main aspects.
1. CVC-HFK AEC
The CVC-HFK echo canceller is a "stateless" AEC that uses a variant of the standard frequency domain NLMS algorithm as its primary adaptive filter. We will explain the benefits of using these methods below. First, the subband frequency domain method can unassociate or whiten the input signal in each band, which achieves faster convergence than the AEC in the equivalent time domain. Second, stateless AEC enables continuous filter adaptation, which improves robustness and overall fuzzy sound performance in noisy environments. As mentioned earlier, in the DT case, the microphone signal contains both echo and near-end speech. The near-end speech is not associated with the echo signal, which would cause the divergence of the adaptive filter if no process is avoided. Third, NLMS can achieve consistent convergence independent of input amplitude.
Because of this, the CVC-HFK AEC can achieve a typical 40dB ERLE (echo return loss gain value), up to 50dB ERLE, and can achieve fast convergence time of about 80ms, and can be fully duplexed in most environments. . In addition, the CVC-HFK AEC uses a 64ms tail length for its adaptive filter, which allows for greater flexibility in internal capacity.
2. CVC-HFK NS (Noise Suppressor)
The CVC-HFK Noise Suppressor is a frequency domain algorithm that utilizes speech and noise characteristics to help extract speech from synthesized noise and voice signals. The two main modules of CVC-HFK NS are speech composition analysis and speech extraction.
The speech component analysis module uses the temporal and related properties of speech and noise to construct a predictable model of speech. The speech extraction block modifies each frequency component based on the speech and noise model. In addition, the speech extraction block can also make full use of the sound quality principle to minimize the noise floor and the perceived speech distortion.
CVC-HFK NS uses this solution to achieve 10-15dB SNR (Signal to Noise Ratio) improvement in noisy environments while maintaining good voice quality. In very low noise environments where the SNR is already high enough, speech distortion does not occur because the NS is turned off.
3. CVC-HFK NLP (Nonlinear Processing)
The CVC-HFK NLP is minimal due to increased system distortion. The amount of distortion added by the CVC-HFK NLP is much lower than a standard NLP module such as a center clipper because it uses information from the input and error signals to determine additional attenuation. Since all CVC-HFK modules use frequency domain algorithms, significant memory savings and simplified computational complexity can be achieved compared to solutions that use both time domain and frequency domain algorithms.
System integration design
When integrating TI-HFK boards with cellular hands-free kits, several components and appropriate interfaces are required to achieve a good mobile call.
You must choose components that are compatible with both the CVC-HFK application and board hardware for good performance. The HFK supports a wide range of loudspeakers, loudspeakers and car audio systems. However, in order to reduce changes to the application manual, we have selected dedicated industry standard components, which will greatly help your success. Three connections are required from the TI-HFK board to the cellular kit for integration: the loudspeaker inputs TI HFK board; the outgoing, processed audio output; the input, the incoming signal from the cellular kit.
Here are some suggestions for the design of the loudspeakers and loudspeakers.
1. Position and Orientation of the Loudspeaker For optimal overall microphone performance, some key variables should be known before the device is installed in the car. It is recommended to keep the distance between the loudspeaker and the user's mouth in the car at 46 cm (18 inches). Recommended distances range from 30 to 56 cm (12-22 inches).
2. Avoid exposing the loudspeaker to airflow (windows and fans) as much as possible;
3. Properly consider the size of the loudspeaker and the installation scheme so that the front of the loudspeaker can be aimed at the user's mouth. Based on the above considerations, with the help of Figure 3, you can choose the best loudspeaker position. First, please follow the recommendations in Priority 1, 2 and 3. Once a decision is made, you can secure the loudspeaker with a metal plate or velcro tape that can be connected back to the electronics for termination. The cable should then be concealed and aesthetically pleasing, in addition to keeping the cable secure and not being squeezed or knotted. Finally, parallel cables should be avoided from connecting to antenna connectors and other noisy cables.
4. Speaker Position It is recommended to install the speaker in the appropriate position to provide good speech performance without disturbing the microphone pickup area. The pick-up area is a +30 degree cone that protrudes from the front of the loudspeaker to the driver of the car. 
Figure 3: Speaker placement
The speaker should be located at least 1 meter (3 feet) from the microphone. The speaker should be kept away from the pickup area of ​​the microphone to reduce the chance of echo feedback. Ideally, the speaker should be located 90 degrees behind the front of the loudspeaker. The sound distortion of the speaker has a direct negative impact on the echo.
Summary of this article
The use of hands-free systems continues to grow, and users are expecting ever-increasing performance. Given the many options available for HFK implementations, it is clear that integrating software algorithms with hardware signal processors is a thoughtful move that will be very beneficial. The HFK Development Kit addresses all of these issues and benefits those who develop or sell these products. The TI TMS320C5407 development kit with AEC and CVC-HFK delivers the flexibility and performance needed to bring HFK solutions to market quickly and inexpensively.
Vehicle signal processing and audio system based on Clarity CVC-HFK hands-free development platform
Echo Cancellation (AEC) provides a comfortable full-duplex hands-free calling in the car. The Clarity CVC-HFK described in this article provides an integrated Single Amplifier Solution (OMS) noise suppression algorithm.