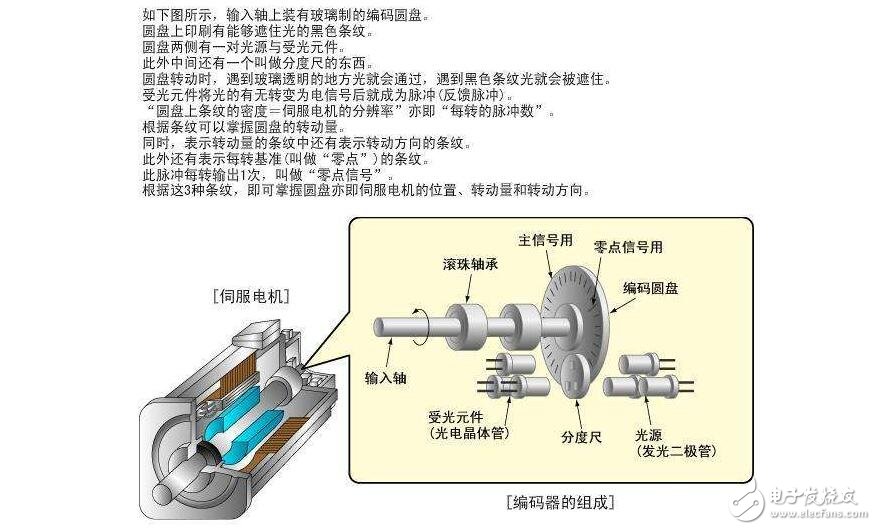
A stepper motor is an actuator that converts a digital pulse signal into an angular displacement. That is, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle (ie, step angle, step angle) in the set direction. You can control the angular displacement by controlling the number of pulses to achieve accurate positioning. At the same time, you can control the speed and acceleration of the motor by controlling the pulse frequency to achieve the purpose of speed regulation. The accuracy of a general stepper motor is 3-5% of the step angle and does not accumulate. A servo motor is an engine that controls the operation of a mechanical component in a servo system, and is an auxiliary motor indirect transmission. The servo motor can control the speed and position accuracy very accurately, and can convert the voltage signal into torque and speed to drive the control object. The servo motor rotor speed is controlled by the input signal and can react quickly. It is used as an actuator in the automatic control system, and has the characteristics of small electromechanical time constant, high linearity, and starting voltage, which can receive the received electrical signal. Converted to an angular displacement or angular velocity output on the motor shaft. Divided into two major categories of DC and AC servo motor, its main feature is that when the signal voltage is zero, there is no rotation phenomenon, and the rotation speed decreases uniformly with the increase of torque. The servo motor is mainly positioned by pulse. Basically, it can be understood that when the servo motor receives one pulse, it will rotate the angle corresponding to one pulse to realize the displacement. Because the servo motor itself has the function of emitting pulses, the servo motor Each time an angle is rotated, a corresponding number of pulses are emitted, so that the pulse received by the servo motor forms an echo, or a closed loop, so that the system knows how many pulses are sent to the servo motor, and how many pulses are received. Back, in this way, the rotation of the motor can be controlled very accurately, so that accurate positioning can be achieved, which can reach 0.001 mm. The stepper motor is a discrete motion device that is intrinsically linked to modern digital control technology. In the current domestic digital control system, the application of stepper motors is very extensive. With the advent of all-digital AC servo systems, AC servo motors are increasingly being used in digital control systems. In order to adapt to the development trend of digital control, stepping motor or all-digital AC servo motor is mostly used as the execution motor in the motion control system. Although the two are similar in control mode (burst and direction signals), there are large differences in performance and application. Now compare the performance and difference between the servo motor and the stepper motor. 1. Different control precision The two-phase hybrid stepping motor step angle is generally 3.6 °, 1.8 °, and the five-phase hybrid stepping motor step angle is generally 0.72 °, 0.36 °. There are also some high performance stepper motors with smaller step angles. For example, a stepping motor for a slow wire-cutting machine produced by Sitong has a step angle of 0.09°; a three-phase hybrid stepping motor produced by BERGER LAHR can pass the step angle. The DIP switches are set to 1.8°, 0.9°, 0.72°, 0.36°, 0.18°, 0.09°, 0.072°, and 0.036°, and are compatible with the step angle of two-phase and five-phase hybrid stepping motors. The control accuracy of the AC servo motor is guaranteed by the rotary encoder at the rear of the motor shaft. Taking Panasonic's all-digital AC servo motor as an example, for a motor with a standard 2500-line encoder, the pulse equivalent is 360°/10000=0.036° due to the quadruple frequency technology inside the driver. For a motor with a 17-bit encoder, the drive receives one revolution per 217 = 131072 pulse motors, ie its pulse equivalent is 360°/131072 = 9.89 seconds. It is 1/655 of the pulse equivalent of a stepping motor with a step angle of 1.8°. 2, low frequency characteristics are different Stepper motors are prone to low frequency vibration at low speeds. The vibration frequency is related to the load condition and the performance of the driver. It is generally considered that the vibration frequency is half of the take-off frequency of the motor no-load. This low frequency vibration phenomenon, which is determined by the working principle of the stepper motor, is very detrimental to the normal operation of the machine. When the stepper motor works at low speed, damping technology should generally be used to overcome the low frequency vibration phenomenon, such as adding a damper to the motor or using subdivision technology on the drive. The AC servo motor runs very smoothly, and vibration does not occur even at low speeds. The AC servo system has a resonance suppression function, which can cover the rigidity of the machine, and has a frequency analysis function (FFT) inside the system, which can detect the resonance point of the machine and facilitate system adjustment. 3, the characteristics of the moment frequency are different The output torque of the stepping motor decreases as the speed increases, and it drops sharply at higher speeds, so the maximum operating speed is generally 300-600 RPM. The AC servo motor is a constant torque output, that is, it can output the rated torque within its rated speed (generally 2000RPM or 3000RPM), and it is a constant power output above the rated speed. 4, different overload capabilities Stepper motors generally do not have overload capability. The AC servo motor has a strong overload capability. Take the Panasonic AC servo system as an example, it has speed overload and torque overload capability. Its maximum torque is three times the rated torque and can be used to overcome the moment of inertia of the inertia load at the moment of starting. Because there is no such overload capability in the stepping motor, in order to overcome this moment of inertia during the selection, it is often necessary to select a motor with a large torque, and the machine does not need such a large torque during normal operation, and a torque appears. The phenomenon of waste. 5, different operating performance The control of the stepping motor is open-loop control. If the starting frequency is too high or the load is too large, it may be lost or blocked. If the speed is too high during the stop, the overshoot may occur. Therefore, in order to ensure the control accuracy, it should be handled well. The problem of rising and falling speed. The AC servo drive system is closed-loop control. The drive can directly sample the feedback signal of the motor encoder. The internal position loop and speed loop are formed. Generally, the stepless motor is lost or overshooted, and the control performance is more reliable. 6, the speed response performance is different It takes 200 to 400 milliseconds for the stepper motor to accelerate from standstill to the operating speed (typically several hundred revolutions per minute). The AC servo system has better acceleration performance. Taking the Panasonic MSMA 400W AC servo motor as an example, it takes only a few milliseconds to accelerate from standstill to its rated speed of 3000 RPM, which can be used for control applications requiring fast start and stop. In summary, the AC servo system is superior to the stepper motor in many performance aspects. However, in some occasions where the requirements are not high, stepper motors are often used to perform the motor. Therefore, in the design process of the control system, it is necessary to comprehensively consider the control requirements, cost and other factors, and select the appropriate control motor. In the specific application, when the terminal load is stable, the action is simple, and the operation is basically low speed, the stepping motor with low cost and easy control is most suitable; but when the terminal load fluctuation range is large, the action is simple, and the operation is basically low speed, If you choose a stepper motor, you will face a series of troubles, because the stepper motor driven by square wave is difficult to eliminate vibration and noise, and will cause out-of-step or overshoot due to torque fluctuation. In fact, when the terminal load fluctuation range is large, even if it is basically a low-speed operation state, the servo motor should be selected. After considering factors such as efficiency improvement factors, energy saving factors, control accuracy improvement factors, and system stability increase, it will be found. The use of higher-priced servo motors has increased the overall cost. What should you pay attention to when replacing a stepper motor with a servo motor? 1. In order to ensure that the control system does not change much, the digital servo system should be used, and the original pulse control mode can still be used; 2. Due to the strong overload capability of the servo motor, the rated torque of the servo motor can be determined by referring to 1/3 of the rated output torque of the original stepping motor; 3. Since the rated speed of the servo motor is much higher than that of the stepping motor, it is better to increase the speed reducer to allow the servo motor to work close to the rated speed. This also allows the motor with a smaller power to be selected to reduce the cost. The current performance of servo motors tends to be stepped: 1, small volume and high efficiency: the use of the latest permanent magnet materials and optimized motor design, so that smaller motors can also produce a large torque. When the same type of motor is matched with different drives, the maximum output torque is different; when the same volume of motor adopts different winding forms and different magnetic pole numbers, the output power is different; 2, impact resistance torque: the maximum torque can reach several times the rated torque; 3, using high-performance magnetic materials, high magnetic energy product; 4. Temperature monitors are available on both the motor and the drive. Whether servo motor control can replace stepper motor control 1. Stepper motor and servo motor are control motors, mainly used for precise positioning control purposes. Especially for servo motors, CNC motors are commonly used. Generally use controller + driver + servo (stepping) motor + coupling + screw pair + guide does not require a reducer, because the servo and step speed can adjust the speed in a wide range according to the pulse frequency. 2. The servo motor is closed-loop control, and the stepping is generally open-loop control. Servo precision is more expensive than stepping. 3. Servo, stepping are used for positioning, for example, moving from the origin to a certain speed to 10mm and then to 25mm to stop returning. 4. Both are special motors, which can precisely control the speed. However, the principle of controlling speed is different: the servo motor is closed-loop control (completed by encoder feedback, etc.), that is, the speed of the motor is measured in real time; the stepping motor is open-loop control, and a pulse stepping motor is turned over. Fixed angle, but does not measure speed. Dock Station Type C,7-Port USB Charging Station Dock,7-Port Charging Station,Type C USB HUB,7 in 1 USB HUB C Docking Station Shenzhen Konchang Electronic Technology Co.,Ltd , https://www.konchang.com