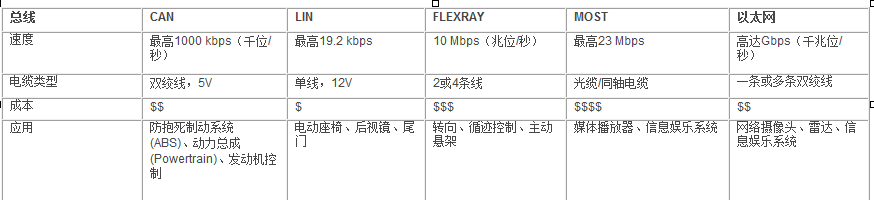
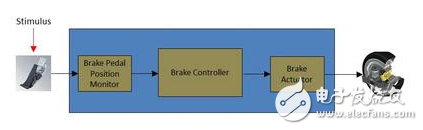
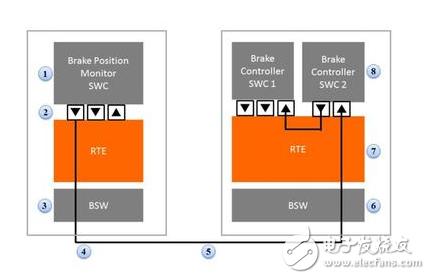
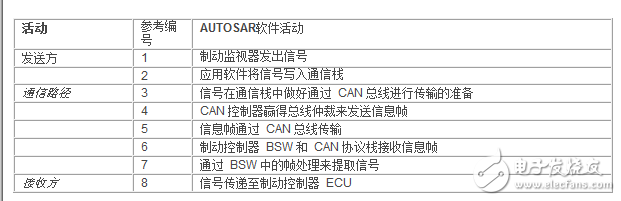
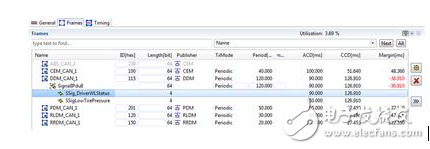
Car data bus A typical modern car will be equipped with various buses and protocols and select the right network from LIN, CAN, FlexRay, MOST and Ethernet. Multimedia/audiovisual signals and car surround camera systems require higher data rates, so car manufacturers and OEMs choose to replace MOST with Ethernet on their network solutions. But for many standard automotive features, the bandwidth and performance provided by LIN and CAN is sufficient. In the automotive architecture, the ECUs are grouped together to form a “cluster†that is connected by a communication “gatewayâ€. Clusters often share the same type of bus, so to achieve high reliability, high speed standards, FlexRay networks are required, but less demanding door lock ECUs can be handled by CAN or LIN. ECU gateways often have to connect different types of signals and perform mapping and conversion functions between different bus architectures. The automotive industry places strong demands on increasing safety and compliance with standards such as ISO26262, which in turn improves the performance of in-vehicle networks while reducing manufacturing and component costs. Evolving network standards can adapt to ever-increasing data rates, and automotive cables have reached a safe and low-cost goal. See Table 1 for the characteristics and applications of typical automotive network solutions. Table 1: Automotive Network Bus Network timing analysis Let's take a closer look at the timing analysis of CAN and FlexRay networks. It is useful to understand the basic characteristics and differences of these two types of networks. CAN network: CAN is a widely used class of in-vehicle networks operating on ISO 15765-2. The CAN bus provides a high level of system flexibility, making it relatively easy to add new ECU receiver nodes to an existing CAN network without making major hardware or software changes to existing ECU nodes. For automotive designers, this can greatly help them expand or upgrade existing networks or design new variants. FlexRay network: The FlexRay protocol is more deterministic than CAN. FlexRay is a "time-triggered" protocol that offers different options for sending information to a destination address within a precise time frame -- accurate to 1us. FlexRay information can be up to 254 bytes, so the amount of complex information that needs to be exchanged between ECUs is large. FlexRay has a higher data transfer rate than CAN. Since the timing is predetermined, the information needs to be planned in advance and is generally pre-configured or designed by the automotive OEM or Tier 1 supplier partner. In networks using the CAN protocol, the ECU node only needs to know the correct baud rate for communication, but the ECU nodes on the FlexRay network must know how the various parts of the network are configured and connected when communicating. Checking and verifying the timing of the FlexRay network is time consuming -- therefore, automated timing analysis and packaging of information into time frames reduces error and design cycle time. Define network timing The first step in simulating the timing of a car network is to accurately define the connections between the ECUs. The software approach proposed by AUTOSAR defines all vehicle functions as a collection of software components and maps them to the physical ECU hardware. An ECU may have several functions, while internal signals pass between them. Once the connection is defined, the timing parameters (if known) for each object in the design can be defined. Timing information has multiple external sources; the widely used automotive standard is FIBEX, an XML-based standardized file format defined by the Automation and Measurement Systems Standards Association (ASAM). See Figure 1 and Figure 2 for the physical path of the example system. The brake position monitor module is connected to the controller ECU and in turn to the actuator. Within each module, individual software components also have an impact on latency. We will look at the impact of these components on overall system latency. Brake system signal path overview Brake system with AUTOSAR components - detailed timing parameters can be defined Table 2: Transmission steps for the AUTOSAR brake example In the example provided in Table 2, the end-to-end signal path can be up to 100ms. From the actual measurement results, we know that the sender needs 5ms, and the receiver needs 10ms, so the communication path delay can be up to 85ms. If you use the advanced AUTOSAR component editor, such as Mentor's VSA COM Designer tool, you can enter timing information for each component in the path, but this is also a daunting task. Another method is to import timing and connection information from an external database. When simulating the CAN bus data path, you need to take into account the uncertainty at the start of the transfer. It may happen that higher priority information occupies the data bus, causing transmission delays. So find the jitter factor that causes the delay variation -- usually know ahead of time how many higher priority signals may be on the bus so that the jitter factor can be predicted as accurately as possible. With these parameters and automated design rule checking (DRC), the maximum delay from step (3) to step (7) is 74.5 milliseconds, and such design checks can be passed. This is the "worst case" test, and designers have to believe that path latency will never be worse than this, and it will actually be much better. Typical timing report from the VSA COM timing analysis tool showing DRC violations Figure 3 shows a typical timing report in which signal path violations are highlighted in red. The overall bus utilization is shown at the top of the table (3.69%). Automotive communication matrix synthesis The overall definition of automotive network scheduling is typically stored in a "communication matrix" that is part of the central gateway ECU. The design tool solution developed by Mentor can be used to automatically synthesize this database and package all the different information into frames in the correct order. The AUTOSAR signal information is combined into Protocol Data Units (PDUs) which are then combined into a transmission frame. For CAN and LIN frames, there is one PDU per frame, but one FlexRay frame may contain multiple signal PDUs. There is a problem in installing a fully defined communication system, that is, it is difficult to have architectural changes in the future, and may require a complete redesign of the network, but the advantages of high speed and certainty of transmission make this method to FlexRay. The application creates great appeal and ensures the car's very high safety requirements. in conclusion AUTOSAR provides pre-defined standard methods for in-vehicle networking and ECU design. But designers still face challenges in how to improve the efficiency and performance of their designs. By using design automation aids to calculate timing and generate in-vehicle communication systems, you can greatly increase the utilization of valuable network bandwidth while maintaining a safe range of automotive performance. As the complexity of CAN, FlexRay, and Ethernet fusion increases, the use of automated design rule checking and timing performance synthesis tools will help reduce design time and avoid cumbersome manual verification processes. Earphones Plug Wireless,Wireless Earphone,Earphones For Iphone,Earphone For Samsung,wireless bluetooth earphone Shenzhen Konchang Electronic Technology Co.,Ltd , https://www.konchang.com