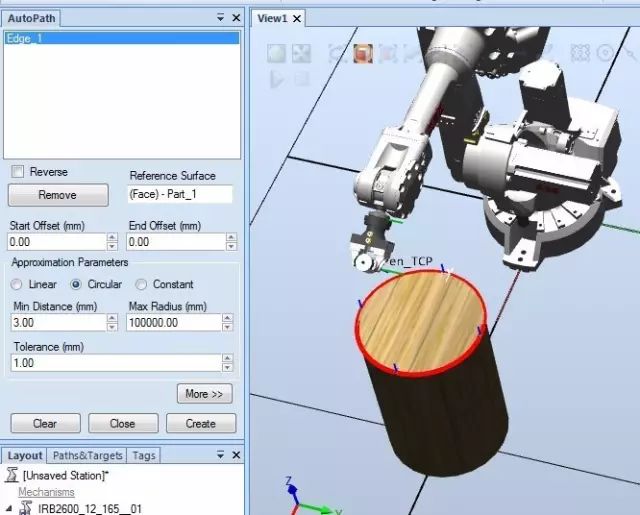
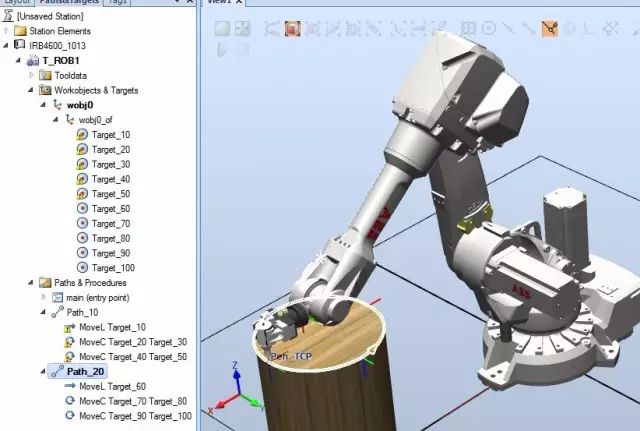
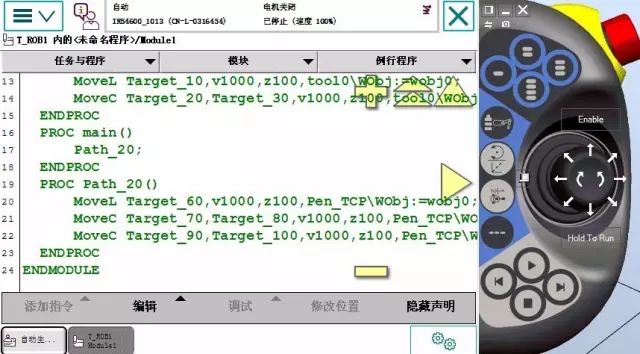
RobotStudio is an off-line simulation debugging software for ABB robots and can also support VR experience. Come today and introduce the powerful software of this ABB robot! 1 Supports all ABB robot models as well as positioners, rails, etc. 2 Fully identical to the actual teach pendant operation in the field, the robot motion simulation is consistent with reality, and it can truly achieve what is seen in Robot Studio. 3 Abundant off-line trajectory automatic generation function, support for a variety of digital-to-analog import, automatic generation of robot trajectory, eliminating the heavy and repetitive work caused by manual on-site commissioning. 4 Introduction Efficient code debugging environment 5 Rich powerpac (RobotStudio plug-in) function, for different industries, quickly solve the robot trajectory generation, programming problems. For example, Machining Powerpac is fast and convenient for the following trajectories. 6 The location and speed of the robot and our general understanding of the location and speed may be somewhat different. 1. The data types used to represent the position in ABB robots are: Robtarget is used to define the position in a move instruction that moves the arm and additional axes. The jointtarget is used to determine the position to which the arm and the external axis were moved by the MoveAbsJ instruction. 2. The data types used to express speed in ABB robots are: Speeddata is used to specify the rate at which the arm and the outer shaft begin to move. 3. The composition of robtarget is as follows. V_tcp uses mm to indicate the position of the tool center point (x, y, and z). Specifies the position relative to the current target coordinate system, including program shifts. If no workpiece is specified, the world coordinate system. The orientation of the v_ori tool, expressed in quaternions (q1, q2, q3, and q4). The axis configuration of the v_leax robot arm (cf1, cf4, cf6, and cfx). V_reax The position of the additional axis. 4. The jointtarget component is as follows. The axis position of the robax manipulator axis, in degrees. Extax The position of the outer axis. For rotary axes, its position is defined as the number of degrees of rotation from the calibration position. For a linear axis, its position is defined as the distance (in mm) from the calibration position. Undefined external axis, value 9E9 5. The speeddata component is as follows: Velocity of the v_tcp tool center point in mm/s The relocation rate of v_ori TCP, expressed in degrees/second. V_leax The rate of the linear outer shaft in mm/s. V_reax The rate at which to rotate the outer shaft in degrees per second. 5.1 Column Speaker,Column Array Speakers,Column Speakers,Column Speaker System GUANGZHOU SOWANGNY ELECTRONIC CO.,LTD , https://www.jerry-power.com